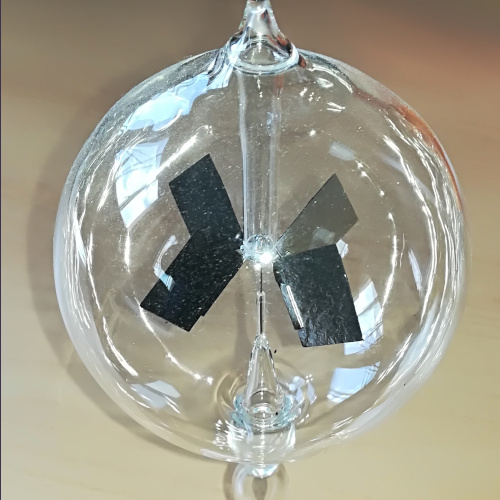
A Crookes Radiometer is a scientific device (often looking a bit like a lightbulb) with a number of mobile vanes, colored black on one side, and reflective on the other. Inside the glass is a partial vacuum, that enables the effect where light appears to 'push' the vanes around. Interestingly for the Victorians, the vanes move in the opposite direction from the way you'd expect if light had mass.
During my PhD I became interested in Crookes Radiometers, specifically I wondered if you could build something that did the same thing with Neutrons - effectively creating a potential route to micro or nano neutron flux powered systems, or maybe a novel neutron detection system.
The story of the Crookes Radiometer is quite fascinating. It turns out that the Victorians were really interested in these devices (now mainly known as "that thing that hangs in your Granny's window"). With giant names in science like Maxwell and Reynolds slugging it out over the pages of academic journals - Reynolds had understood that the system was to do with forces caused by temperature gradients - his work lined up with observations, while Maxwell remained convinced that it was connected to theoretical predictions he'd made connected to light's mass, but neither could completely explain the phenomena. As is often the way with the big ego's of science, it got pretty personal! Maxwell wrote a rude review of Reynolds work and in the end, the final repost by Reynolds was never published out of respect for Maxwell after his passing! Reynolds, it turns out had it right - but he didn't know why! This is where Einstein comes in! If you want
more technical details and a good history then I would look at wikipedia In a way typical of Einstein's razor sharp brain, he explains the derivation of forces conceptually from almost no assumptions in one fell swoop! His paper is a
tour-de-force, it can be understood by someone with A-level(high-school) maths (math) and yet explains a previously unknown phenomena (which would later be known as the
Knudsen pump) The idea is based around the edges of a vane (the fact that more 'edges' are created by making the vane porous is a tiny extension!) It was a big deal at the time as it ended the dicsussion of the Crookes Radiometer. Everyone breathed a sigh of relief and science moved on. The process is not covered by the Navier-Stokes equations and it has tended to be ignored in subsequent thermodynamics literature which seems to like the pretty pictures generated by Navier-Stokes! Leaving these little devices as nothing more than a curio.
As a good PhD student (or one who'd drunk too much coffee) I tried to always trace my sources. Einstein's original paper was published in 1924 in "Zeitshrift für Physik BDXXVII", its easy enough to find papers that reference it. It turned out to be alot harder to actually find the paper! Einstein's estate were notoriously careful to protect it, and so I eventually found a paper copy in one of the Cambridge University satelite libraries! I was pretty excited and made a
copy of the original German [pdf]!
In order to understand the work,
I made a translation of the Einstein paper into English - As far as I can tell, this paper was never published in English before! This was in 2019, but on asking at my university library I was advised that the translations were considered derivative works and I couldn't publish my translation without the permission of his estate... until 2026 (70 years after the death of the great fellow) when his words would be in the public domain. So here we are, I am in the clear!
I am not a great physicist, but I do enjoy Einstein, his explanation of Special Relativity is so simple, yet so far reaching. General Relativity is also somewhat accessible (although I am still working to get through the maths!). This paper is also a great example of science in action - in it basic tools, nothing more difficult than trigonometry and vectors are used to explain a previously unexplained phenomena. It is truly an honour to read this paper and an inspiration that he can reach forward in time over a hundred years. In my view science should be accessible and readible - plenty of contempory scientists wrote in a way that was difficult to understand, but Einstein writes in a way that helps us understand!
The paper is being hosted as a preprint at the
institutional repository of the University of Cambridge, Apollo. I have to give a big shout out to the
Open Systems Research Team who made this possible! Thanks guys!
There you have it, a previously unpublished Einstein translation ... in my next post, I will use the principle of the Crookes Radiometer to generate a novel method of harvesting neutron energy - watch this space! :D